’You hear a lot about self-driving cars, but not about robots that could be moving around among pedestrians’ - Aude Billard, head of LASA
’You hear a lot about self-driving cars, but not about robots that could be moving around among pedestrians’ - Aude Billard, head of LASA
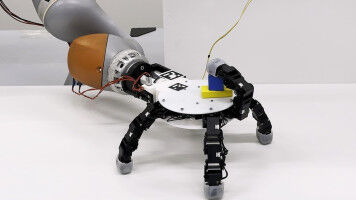
'You hear a lot about self-driving cars, but not about robots that could be moving around among pedestrians' - Aude Billard, head of LASA © Alain Herzog / 2021 EPFL Robotic wheelchairs may soon be able to move through crowds smoothly and safely. As part of CrowdBot, an project, researchers are exploring the technical, ethical and safety issues related to this kind of technology. The aim of the project is to eventually help the disabled get around more easily. Shoppers at Lausanne's weekly outdoor market may have come across one of EPFL's inventions in the past few weeks - a newfangled device that's part wheelchair, part robot. It's being used by researchers at EPFL's Learning Algorithms and Systems Laboratory (LASA) to test technology they're developing under CrowdBot, a project led by INRIA and involving a consortium of seven research organizations, including EPFL. The project has received funding from the EU's Horizon 2020 program in the Information and Communication Technology (ICT) section. CrowdBot aims to test the technical and ethical feasibility of having robots move through crowded areas.
POUR LIRE CET ARTICLE, CRÉEZ VOTRE COMPTE
Et prolongez votre lecture, gratuitement et sans engagement.
Vos avantages
- Accès à l'ensemble du contenu
- Recevoir des alertes pour les nouvelles et les offres d'emploi
- Publier des annonces