Des chercheurs de l’ETH Zurich ont développé des muscles artificiels contenant des microbulles et pouvant être contrôlés par ultrasons. À l’avenir, ces muscles pourraient être utilisés comme bras préhenseur, comme pansement, pour délivrer des substances actives de manière ciblée ou comme robot en médecine et en technique.
À première vue, cela ressemble à une simple expérience sur les matériaux : Il suffit d’une brève impulsion ultrasonique pour qu’une fine bande de silicone commence à se plier ou à se courber. Mais il y a bien plus derrière tout cela. Une équipe dirigée par Daniel Ahmed, professeur de robotique acoustique dans le domaine des sciences de la vie et de la santé, a développé une nouvelle classe de muscles artificiels : des membranes flexibles qui réagissent aux ultrasons grâce à des milliers de minuscules bulles d’air.
Un mouvement flexible grâce à l’agencement des bulles
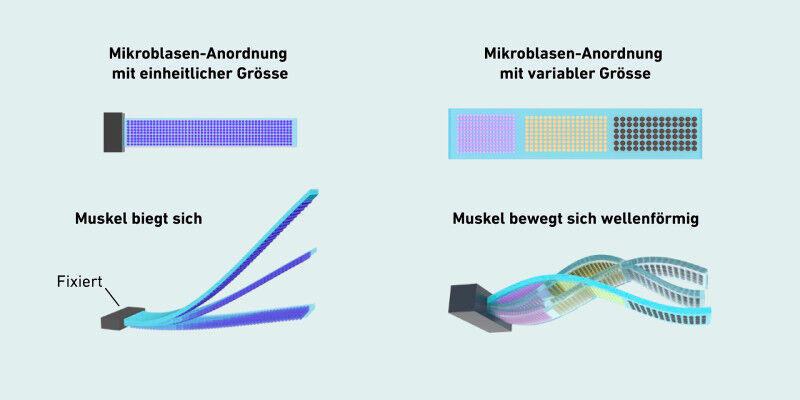
Pour fabriquer les muscles artificiels, les chercheurs ont utilisé un moule doté d’une microstructure. La membrane en silicone fabriquée dans ce moule présente de minuscules pores sur sa face inférieure, chacun d’entre eux ayant une profondeur et une largeur d’environ 100 micromètres, soit l’épaisseur d’un cheveu humain. Lorsque les chercheurs plongent la membrane dans l’eau, de minuscules bulles d’air restent enfermées dans les pores.
Lorsque les ondes sonores rencontrent ces bulles, elles se mettent à vibrer et créent un courant directionnel qui fait bouger le muscle. La taille, la forme et la disposition des bulles peuvent être contrôlées avec précision - il en résulte des mouvements allant d’une courbure régulière à des motifs ondulés. Les muscles réagissent en quelques millisecondes et peuvent être contrôlés sans fil.
Une prise douce, un mouvement glissant
Les chercheurs ont démontré les muscles artificiels dans plusieurs applications. L’une d’entre elles est un bras de préhension miniature et souple. Lors de l’expérience, ils ont pu montrer que celui-ci pouvait saisir délicatement une larve de poisson zèbre dans l’eau et la relâcher ensuite. "C’était fascinant de voir avec quelle précision et quelle douceur le préhenseur fonctionnait - la larve a ensuite nagé sans dommage", raconte Zhiyuan Zhang, ancien doctorant chez Ahmed et l’un des deux premiers auteurs de l’étude publiée dans la revue spécialisée Nature.
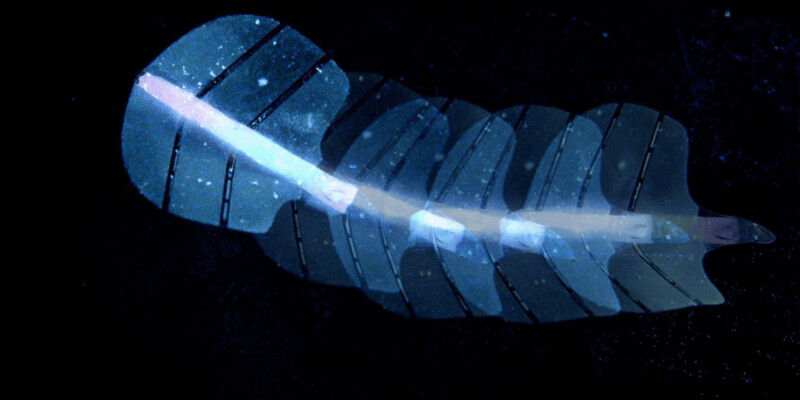
Pour démontrer les mouvements ondulatoires, les chercheurs ont en outre construit un robot en forme de minuscule raie pastenague. Il mesure environ quatre centimètres de large. Deux muscles artificiels assurent la fonction des nageoires pectorales. Dès que les chercheurs les stimulent par ultrasons, un mouvement ondulatoire se produit, qui permet au minirobot de glisser dans l’eau, sans aucun câble. "La locomotion ondulatoire a été pour nous un véritable point fort", déclare Ahmed. "Elle montre qu’avec les bulles, nous ne pouvons pas seulement créer des mouvements simples, mais aussi des motifs complexes comme ceux d’un organisme vivant"
A long terme, le "Stingraybot", comme les chercheurs appellent le robot, pourrait être utilisé dans le tractus gastro-intestinal pour y libérer des médicaments avec précision ou pour assister des interventions mini-invasives. Les chercheurs ont également déjà réfléchi à la manière dont le Stingraybot pourrait un jour être transporté dans l’estomac : ils l’enroulent et le placent dans une capsule spécialement conçue à cet effet, que l’on peut avaler et qui se dissout dans l’estomac.
Adapté aux espaces restreints et aux surfaces sensibles
Les chercheurs ont en outre fabriqué une petite roue à partir de silicone contenant des bulles de différentes tailles, qui peut également être actionnée par ultrasons. Lors d’essais avec un intestin de porc, ils ont pu montrer qu’elle permettait de naviguer dans les circonvolutions intestinales, les chercheurs stimulant les bulles de différentes tailles les unes après les autres. "L’intestin est un environnement particulièrement difficile, car il est étroit, sinueux et irrégulier", explique Zhan Shi, ancien doctorant d’Ahmed et l’autre premier auteur. "C’est précisément pour cette raison qu’il était impressionnant de voir que notre robot-roue pouvait effectivement s’y déplacer"
En outre, les chercheurs ont mis au point des pansements souples qui, grâce à l’activation par ultrasons, peuvent s’accrocher à des structures courbes. De tels pansements pourraient être adaptés individuellement aux formes de tissus et libérer des médicaments localement, par exemple pour le traitement de cicatrices ou de tumeurs. Lors d’expériences, l’équipe a déjà réussi à introduire de manière ciblée un colorant dans un modèle de tissu, à titre de test.
Des muscles mous au potentiel médical

"Nous avons d’abord fait de la recherche fondamentale, puis nous avons démontré la polyvalence des muscles artificiels : de l’administration de médicaments aux pansements sur le cœur, en passant par la locomotion dans le tractus gastro-intestinal", résume Ahmed.
On en est encore au stade des essais en laboratoire, mais le potentiel d’applications médicales et techniques futures est important. À long terme, de tels muscles souples pourraient aider à administrer des médicaments avec plus de précision et à rendre les interventions plus douces. La combinaison de la biocompatibilité, de la flexibilité et du contrôle sans fil en fait un outil prometteur pour la médecine. Pour les chercheurs, la voie vers des muscles à commande acoustique n’en est qu’à ses débuts.
Référence bibliographique
Shi Z, Zhang Z, Schnermann J, Neuhauss SCF, Nama N, Wittkowski R, Ahmed D : Muscles artificiels programmables à commande ultrasonore. Nature, 29 octobre 2025, doi : 10.1038/s41586-025-09650-3