Birds, bats, and bees all’use distinct muscles to deploy and retract their wings. Smaller insects, given the less space available, may be different and scientists are still debating if they use indeed muscles to power their wings. Beetles show a complex example of flying mechanism, having a pair of stiff forewings, called elytra, and a pair of foldable, membranous hindwings: At rest, the hindwings are folded under the protective case of the elytra; before take-off, the elytra open fully and release the hindwings that are deployed in an origami-like way.
Despite recent research on the beetles’ hindwings, studies could not elucidate how they are powered. Now, scientists led by Dario Floreano at EPFL have unveiled for the first time that beetles’ hindwings are passively deployed and retracted. Using a combination of high-speed cameras and tests on robotic models, they show that the hindwings leverage the elytra to deploy and retract while the flapping forces the wings to unfold. The findings could be useful to design new microrobots that could fly in confined spaces. researchers already used the newly acquired knowledge to test a flapping microrobot that exploits a similar passive mechanism to take off, fly, and land. The research has been published in Nature.
"Contrary to the assumption that each motion requires a dedicated mechanism, this study shows that natural evolution leverages control synergies and physical interactions to reduce complexity, save energy, and gain resilience," says Dario Floreano, director of the Laboratory of Intelligent Systems at EPFL. Previous research has extensively explored the origami-like fold of the beetles’ hindwings, assuming that thoracic muscles propel their deployment and retraction. "The main challenge was to demonstrate that muscles are not involved in the wing deployment process at the beetles’ hindwing bases", says Hoang-Vu Phan, a postdoc in the group of Floreano and first author of the publication.

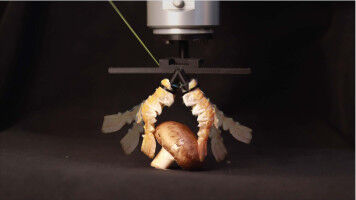
To prove that no muscles are involved, scientists carefully removed one hindwing from the beetle and attached it to a crank of a custom-built flapping mechanism, which also allows free elevation motion. By activating the hindwing flapping at about 38 wing beats per second, similar to that of the rhinoceros beetle, scientists observed the same elevation and unfolding processes as in the insects.
High-speed cameras also showed how, after the flight, the elytra pushed back the wings to rest. Since, by removing one side of the elytra, the hindwing remained open and could not retract, scientists suggest that the elytra, and not muscles, causes the wings’ retraction.
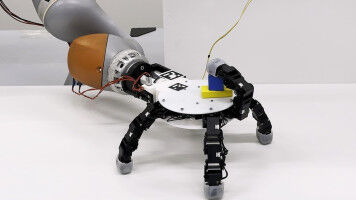
"These findings increase our understanding of locomotion strategies in insects, and bring us one step closer to implementing them into the design of small-scale flying microrobots, making them even more insect-like," says Hoang-Vu Phan. scientists already translated the principle of passive mechanism into a new 18-gram microrobot. In it, a motor activates flapping and the passive deployment of 20 cm wide wings allowing take-off and stable flight. Upon turning off the flapping, the robot rapidly retracts the wings against the body upon landing without needing additional actuators. "These robots are an upgrade of existing flapping robots that keep their wings fixed in a fully extended configuration; they could be particularly useful in cluttered and confined spaces," adds Hoang-Vu Phan.
References
Phan, HV., Park, H.C. & Floreano, D. Passive wing deployment and retraction in beetles and flapping microrobots.Nature (2024). https://doi.org/10.1038/s41586’024 -07755-9