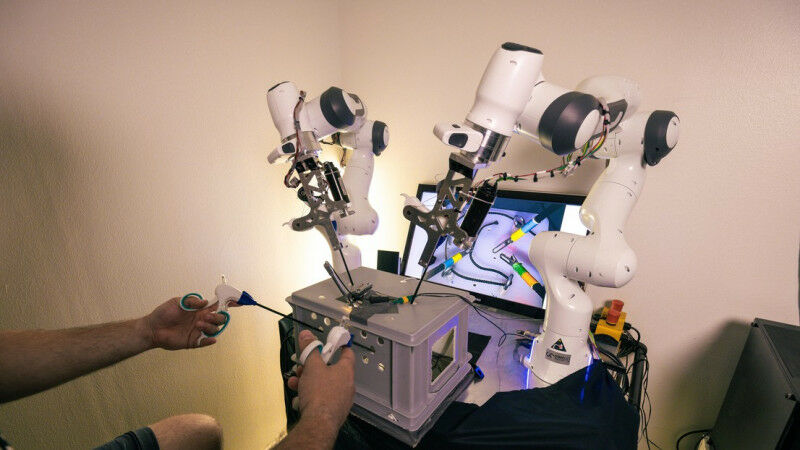
EPFL / Jamani Caillet
EPFL / Jamani Caillet - Des scientifiques de l'EPFL ont développé le premier système capable de procéder à des interventions de chirurgie laparoscopique à quatre mains, en contrôlant deux bras robotisés supplémentaires par des pédales d'interface haptique. Des roboticiens et roboticiennes de l'EPFL ont combiné la manipulation de plusieurs membres avec une augmentation du contrôle partagé, permettant une avancée sans précédent dans le domaine de la chirurgie laparoscopique. Les résultats publiés dans The International Journal of Robotics Research confirment la faisabilité de cette installation en vue de réduire la charge de travail du chirurgien ou de la chirurgienne et d'améliorer la précision et la sécurité. Des spécialistes ont déjà été formés avec succès sur ce système et des essais cliniques sont en cours à Genève. L'étroite collaboration entre le groupe de recherche REHAssist et le Laboratoire des algorithmes et systèmes d'apprentissage ( LASA ) a permis aux doctorants Jacob Hernandez et Walid Amanhoud et à toute l'équipe de recherche de mettre au point un système grâce auquel les chirurgiens commandent deux bras robotisés à l'aide de pédales d'interface haptique ayant cinq degrés de liberté. Chaque main contrôle un outil de manipulation, tandis qu'un pied contrôle la caméra ou l'endoscope et l'autre une pince motorisée. L'une des principales innovations de ce système est le contrôle partagé entre le chirurgien et les assistants robotisés.
POUR LIRE CET ARTICLE, CRÉEZ VOTRE COMPTE
Et prolongez votre lecture, gratuitement et sans engagement.