EPFL / Jamani Caillet
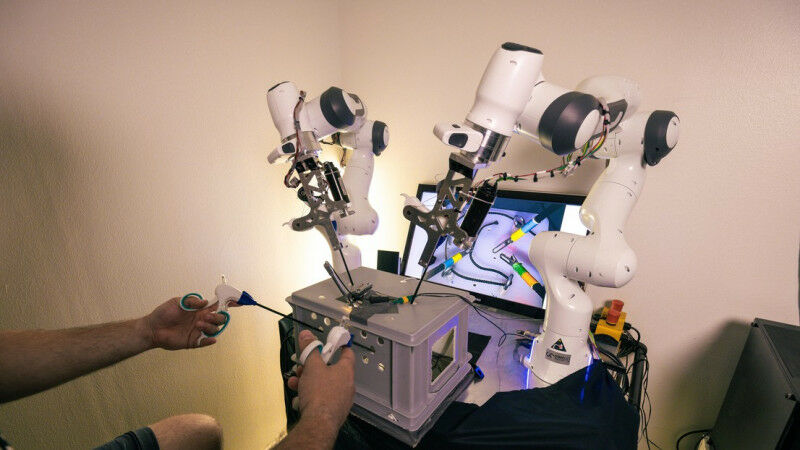
EPFL / Jamani Caillet - Gli scienziati dell'EPFL hanno sviluppato il primo sistema in grado di eseguire interventi di chirurgia laparoscopica a quattro mani, controllando due bracci robotici aggiuntivi mediante pedali con interfaccia aptica. I robotisti dell'EPFL hanno combinato la manipolazione di più arti con un aumento del controllo condiviso, consentendo un progresso senza precedenti nel campo della chirurgia laparoscopica. I risultati, pubblicati su The International Journal of Robotics Research, confermano la fattibilità dell'uso di questo sistema per ridurre il carico di lavoro del chirurgo e migliorare la precisione e la sicurezza. Gli specialisti sono già stati addestrati con successo sul sistema e sono in corso test clinici a Ginevra. La stretta collaborazione tra il gruppo di ricerca REHAssist e il Laboratory for Algorithms and Learning Systems ( LASA ) ha permesso ai dottorandi Jacob Hernandez e Walid Amanhoud e all'intero team di ricerca di sviluppare un sistema che consente ai chirurghi di controllare due bracci robotici utilizzando pedali con interfaccia aptica a cinque gradi di libertà. Ogni mano controlla uno strumento di manipolazione, mentre un piede controlla la telecamera o l'endoscopio e l'altro una pinza motorizzata. Una delle principali innovazioni di questo sistema è il controllo condiviso tra il chirurgo e gli assistenti robotici.
PER LEGGERE QUESTO ARTICOLO, CREA IL TUO ACCOUNT
Ed estendere la vostra lettura, gratuitamente e senza alcun impegno.