EPFL / Jamani Caillet
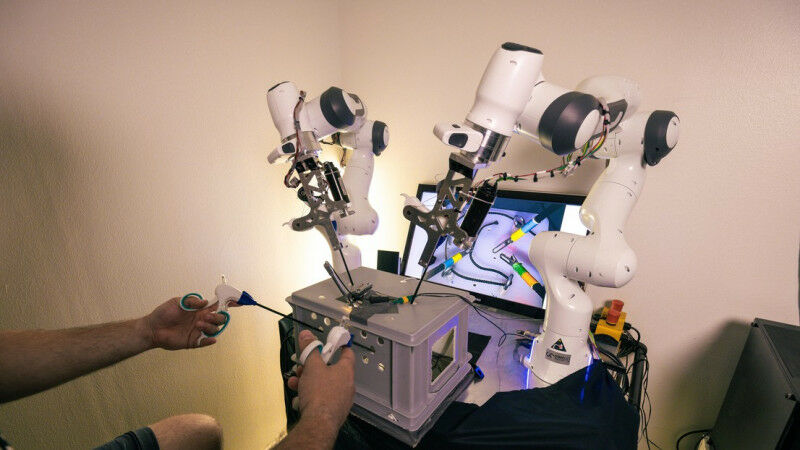
EPFL / Jamani Caillet - Wissenschaftler der EPFL haben das erste System entwickelt, das laparoskopische Operationen vierhändig durchführen kann, indem sie zwei zusätzliche Roboterarme mit Pedalen der haptischen Schnittstelle steuern. Robotiker und Robotikerinnen der EPFL haben die Manipulation mehrerer Gliedmaßen mit einer Steigerung der gemeinsamen Kontrolle kombiniert und damit einen beispiellosen Fortschritt in der laparoskopischen Chirurgie ermöglicht. Die im The International Journal of Robotics Research veröffentlichten Ergebnisse bestätigen die Machbarkeit dieser Einrichtung zur Verringerung der Arbeitsbelastung des Chirurgen oder der Chirurgin sowie zur Verbesserung der Genauigkeit und Sicherheit. Spezialisten wurden bereits erfolgreich in diesem System geschult, und in Genf werden derzeit klinische Versuche durchgeführt. Dank der engen Zusammenarbeit zwischen der REHAssist-Forschungsgruppe und dem Labor für Algorithmen und Lernsysteme ( LASA ) konnten die Doktoranden Jacob Hernandez und Walid Amanhoud sowie das gesamte Forschungsteam ein System entwickeln, mit dem Chirurgen zwei Roboterarme mithilfe von haptischen Schnittstellenpedalen mit fünf Freiheitsgraden steuern können. Jede Hand steuert ein Manipulationswerkzeug, während ein Fuß die Kamera oder das Endoskop und der andere eine motorisierte Zange steuert. Eine der wichtigsten Innovationen dieses Systems ist die gemeinsame Kontrolle zwischen dem Chirurgen und den robotischen Assistenten.
UM DIESEN ARTIKEL ZU LESEN, ERSTELLEN SIE IHR KONTO
Und verlängern Sie Ihre Lektüre, kostenlos und unverbindlich.