Quando si allunga la mano per raccogliere un oggetto come una bottiglia, in genere non è necessario conoscere la sua esatta posizione nello spazio per avere successo. D’altra parte, spiega il ricercatore dell’EPFL Kai Junge, se si vuole creare un robot in grado di prendere una bottiglia, è necessario conoscere il suo ambiente esatto.
"Come esseri umani, non abbiamo bisogno di molte informazioni esterne per afferrare un oggetto, e pensiamo che questo sia dovuto alle interazioni flessibili che si verificano all’interfaccia tra un oggetto e la mano", dice Kai Junge, dottorando nel laboratorio CREATE (Computational Robot Design & Fabrication) della Facoltà di Scienze e Tecnologie ingegneristiche, diretto da Josie Hughes. "È questa flessibilità che ci interessa per i robot"
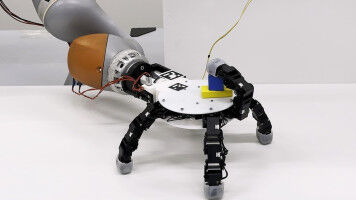
In robotica, i materiali flessibili sono quelli che si deformano, si piegano e si schiacciano. La mano robotica ADAPT (Adaptive Dexterous Anthropomorphic Programmable sTiffness) del laboratorio CREATE utilizza infatti materiali flessibili relativamente semplici: strisce di silicone avvolte attorno al polso e alle dita meccaniche, nonché giunti a molla, combinati con un braccio robotico pieghevole. Questa flessibilità strategicamente distribuita consente al dispositivo di afferrare un’ampia varietà di oggetti eseguendo movimenti di presa "auto-organizzati" che avvengono automaticamente senza essere programmati.
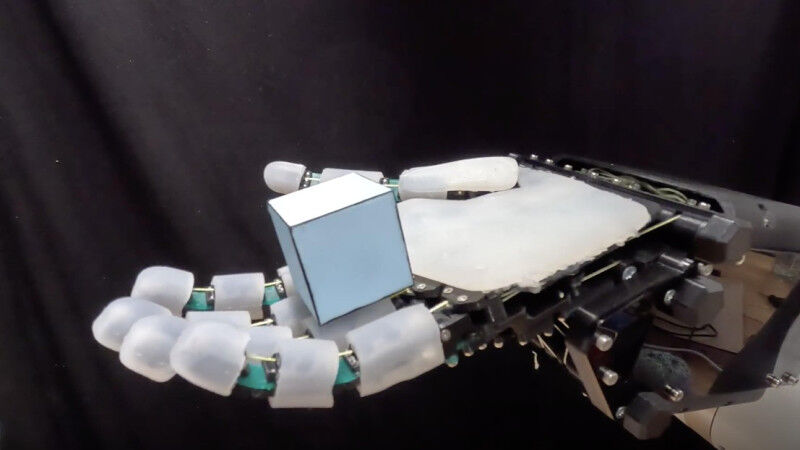
In una serie di esperimenti, la mano robotica, che può essere controllata a distanza, è stata in grado di afferrare 24 oggetti con un tasso di successo del 93%, eseguendo movimenti di presa auto-organizzati vicini a quelli degli esseri umani con una somiglianza del 68%. La ricerca è stata pubblicata su Nature Communications Engineering
Intelligenza robotica dal basso verso l’alto
Mentre una mano robotica convenzionale avrebbe bisogno di un motore per ogni articolazione, la mano dell’EPFL ha solo 12 motori, alloggiati nel polso, per le sue 20 articolazioni. Il resto del controllo meccanico deriva dalle molle, che possono essere rese più rigide o meno rigide per regolare la flessibilità della mano, e dalla "pelle" di silicone, che può essere aggiunta o rimossa.Vogliamo sfruttare l’intelligenza meccanica distribuita in diverse parti del corpo, come la pelle, i muscoli e le articolazioni, in contrapposizione all’intelligenza che discende dal cervello.
Kai Junge, Laboratorio CREATE
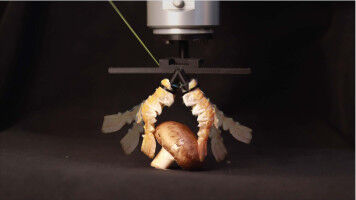
Per quanto riguarda il software, la mano è programmata per articolarsi attraverso quattro punti di passaggio principali, o posizioni, per sollevare un oggetto. Tutti gli altri adattamenti necessari per eseguire il compito sono realizzati senza alcuna programmazione o feedback aggiuntivo. In robotica, questo è noto come controllo ad anello aperto. Ad esempio, quando il team ha programmato il robot per utilizzare un determinato movimento, è stato in grado di adattare la posa della mano a vari oggetti, da un semplice bullone a una banana. Gli scienziati hanno analizzato questa estrema robustezza - grazie alla flessibilità distribuita nello spazio - con più di 300 prese e le hanno confrontate con una versione rigida della mano.
"Sviluppare robot in grado di eseguire interazioni o compiti che gli esseri umani svolgono automaticamente è molto più difficile di quanto la maggior parte delle persone pensi", afferma Kai Junge. "Ecco perché vogliamo sfruttare questa intelligenza meccanica distribuita in diverse parti del corpo, come la pelle, i muscoli e le articolazioni, in contrapposizione all’intelligenza che scende dal cervello"
Bilanciare flessibilità e controllo
Kai Junge sottolinea che l’obiettivo di questa ricerca non era necessariamente quello di creare una mano robotica in grado di afferrare gli oggetti allo stesso modo di un essere umano, ma di dimostrare per la prima volta quanto un robot possa raggiungere con la sola flessibilità.Ora che questo è stato dimostrato sistematicamente, il team dell’EPFL sta sfruttando il potenziale della flessibilità reintegrando nella mano ADAPT elementi di controllo ad anello chiuso, tra cui il feedback sensoriale - aggiungendo sensori di pressione alla pelle di silicone - e l’intelligenza artificiale. Questo approccio sinergico potrebbe portare alla creazione di robot che combinano la robustezza della flessibilità di fronte all’incertezza con la precisione del controllo ad anello chiuso.
"Una migliore comprensione dei vantaggi dei robot flessibili potrebbe migliorare notevolmente l’integrazione dei sistemi robotici in ambienti altamente imprevedibili o progettati per gli esseri umani", ha concluso Kai Junge