Wenn Sie Ihre Hand ausstrecken, um einen Gegenstand wie eine Flasche zu greifen, müssen Sie normalerweise nicht die genaue Position des Gegenstands im Raum kennen, um ihn erfolgreich zu greifen. Wenn man jedoch einen Roboter bauen will, der eine Flasche greifen kann, muss man seine Umgebung genau kennen", erklärt Kai Junge, Forscher an der EPFL.
"Als Menschen brauchen wir nicht wirklich viele externe Informationen, um ein Objekt zu greifen, und wir glauben, dass dies auf die flexiblen Interaktionen zurückzuführen ist, die an der Schnittstelle zwischen einem Objekt und der Hand auftreten", sagt Kai Junge, Doktorand im CREATE-Labor ( Computational Robot Design & Fabrication) der Fakultät für Ingenieurwissenschaften und Technik, das von Josie Hughes geleitet wird. "Es ist diese Flexibilität, die uns bei Robotern interessiert"
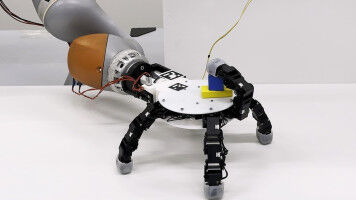
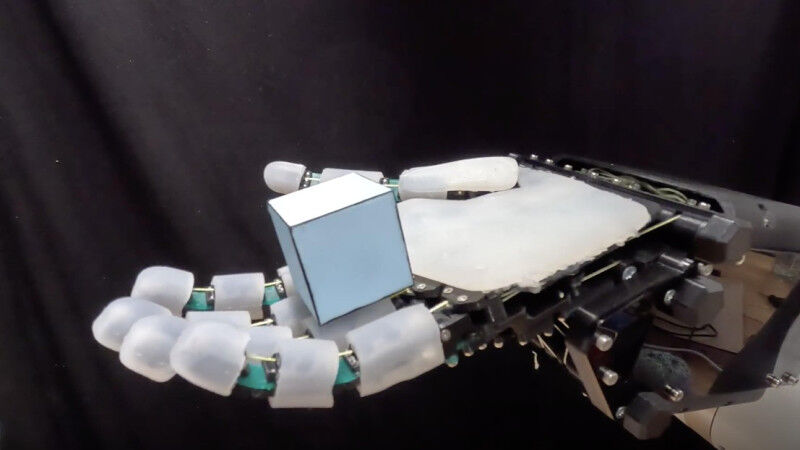
In der Robotik werden flexible Materialien als solche bezeichnet, die sich verformen, biegen und stauchen lassen. Die Roboterhand ADAPT (Adaptive Dexterous Anthropomorphic Programmable sTiffness) des CREATE-Labors verwendet in der Tat relativ einfache flexible Materialien: Silikonstreifen, die um ein Handgelenk und mechanische Finger gewickelt sind, sowie Federgelenke, kombiniert mit einem faltbaren Roboterarm. Diese strategisch verteilte Flexibilität ermöglicht es dem Gerät, eine Vielzahl von Objekten zu greifen, indem es "selbstorganisierte" Greifbewegungen ausführt, die automatisch erfolgen, ohne programmiert werden zu müssen.
In einer Reihe von Experimenten konnte die Roboterhand, die ferngesteuert werden kann, 24 Objekte mit einer Erfolgsquote von 93 % greifen, wobei sie selbstorganisierte Greifbewegungen ausführte, die denen des Menschen mit einer Ähnlichkeit von 68 % nahe kamen. Die Forschung wurde in Nature Communications Engineering veröffentlicht
Aufsteigende robotische Intelligenz
Während eine herkömmliche Roboterhand für jedes Gelenk einen Motor benötigen würde, verfügt die Hand der EPFL für ihre 20 Gelenke nur über 12 Motoren, die im Handgelenk untergebracht sind. Der Rest der mechanischen Steuerung kommt von den Federn, die steifer oder lockerer sein können, um die Flexibilität der Hand anzupassen, und von der Silikon-"Haut", die ebenfalls hinzugefügt oder entfernt werden kann.Wir möchten die mechanische Intelligenz nutzen, die in verschiedenen Teilen des Körpers verteilt ist, wie Haut, Muskeln und Gelenke, im Gegensatz zur Intelligenz, die vom Gehirn absteigt.
Kai Junge, CREATE Laboratory
Was die Software betrifft, so wird die Hand so programmiert, dass sie sich durch vier Hauptdurchgangspunkte oder Positionen bewegt, um einen Gegenstand anzuheben. Alle anderen Anpassungen, die für die Ausführung der Aufgabe notwendig sind, erfolgen ohne zusätzliche Programmierung oder Rückmeldungen. In der Robotik wird dies als Steuerung im offenen Regelkreis bezeichnet. Als das Team den Roboter beispielsweise auf eine bestimmte Bewegung programmierte, konnte er die Handhaltung an verschiedene Objekte anpassen, von einer einfachen Schraube bis hin zu einer Banane. Die Wissenschaftler analysierten diese extreme Robustheit - dank der räumlich verteilten Flexibilität - mit über 300 Greifvorgängen und verglichen sie mit einer starren Version der Hand.
"Die Entwicklung von Robotern, die Interaktionen oder Aufgaben ausführen können, die Menschen automatisch erledigen, ist viel schwieriger, als die meisten Menschen denken", sagt Kai Junge. "Deshalb möchten wir diese mechanische Intelligenz, die in verschiedenen Körperteilen wie Haut, Muskeln und Gelenken verteilt ist, im Gegensatz zur Intelligenz, die vom Gehirn absteigt, nutzen."
Flexibilität und Steuerung ausbalancieren
Kai Junge betont, dass das Ziel dieser Forschung nicht unbedingt darin bestand, eine Roboterhand zu schaffen, die wie ein Mensch nach Gegenständen greifen kann, sondern zum ersten Mal zu zeigen, was ein Roboter allein durch Flexibilität alles erreichen kann.Nachdem dies nun systematisch demonstriert wurde, nutzt das Team der EPFL das Potenzial der Flexibilität, indem es Elemente der Closed-Loop-Steuerung wieder in die ADAPT-Hand integriert, darunter sensorisches Feedback - durch Hinzufügen von Drucksensoren auf der Silikonhaut - und künstliche Intelligenz. Dieser synergetische Ansatz könnte zur Entwicklung von Robotern führen, die die Robustheit der Flexibilität gegenüber Ungewissheit mit der Präzision einer Steuerung im geschlossenen Regelkreis kombinieren.
"Ein besseres Verständnis der Vorteile flexibler Roboter könnte die Integration von Robotersystemen in hochgradig unvorhersehbare oder für Menschen konzipierte Umgebungen erheblich verbessern", fasst Kai Junge zusammen