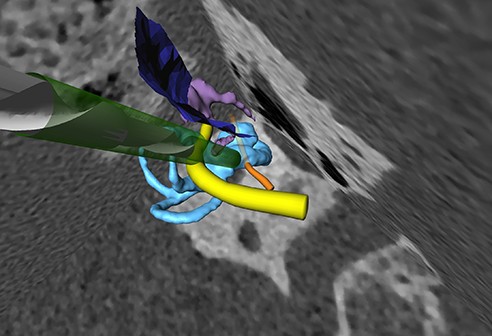
 RCI Trajectory for entry into the cochlea at the preplanned angle. Yellow: Facial Nerve, Orange: Chorda Tympani, Light Blue: Cochlea, Dark Blue: Posterior Wall of the External Auditory Canal, Purple: Ossicles, Green: Planned Trajectory, Grey: Robot Drill Bit.
RCI Trajectory for entry into the cochlea at the preplanned angle. Yellow: Facial Nerve, Orange: Chorda Tympani, Light Blue: Cochlea, Dark Blue: Posterior Wall of the External Auditory Canal, Purple: Ossicles, Green: Planned Trajectory, Grey: Robot Drill Bit.
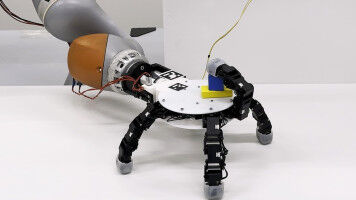
A team of surgeons and engineers of Inselspital, Bern University Hospital, and the ARTORG Center for Biomedical Engineering Research, University of Bern (Switzerland), have developed a high-precision surgical robot for cochlear implantation. In the same way that avionics allow a pilot to fly a plane by instrument solely based on read-outs from the cockpit, the surgical robot developed by the researchers for RCI has the capabilities to perform surgery that a surgeon cannot carry out manually without a robot. To embed an electronic cochlear implant device into the ear of a deaf patient, the surgeon has to create a precise access from behind the ear, through the skull bone all the way into the inner ear. The implant electrode that bridges the damaged part of the inner ear to allow the patient to hear again is then carefully inserted into the cochlea through the access in the bone. Currently this procedure is carried out manually and the ear, nose and throat surgeon directly views the access into the cochlea through the opening in the skull bone. The aim of the Bernese research project was to investigate robotic cochlear implantation technology that could lead to a novel implantation procedure with improved hearing outcomes for CI patients. The researchers found that the use of surgical planning software and a robotic drill process could allow access to the cochlea through a tunnel of approximately 2.5 mm in diameter in a straight line from behind the ear.
TO READ THIS ARTICLE, CREATE YOUR ACCOUNT
And extend your reading, free of charge and with no commitment.
Your Benefits
- Access to all content
- Receive newsmails for news and jobs
- Post ads