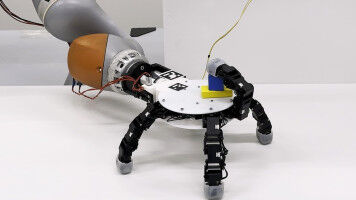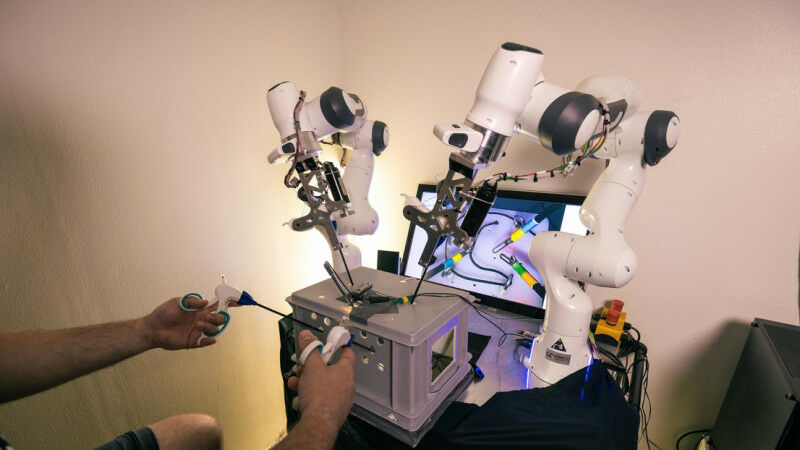
© 2023 EPFL Researchers at EPFL have developed the first system that enables four-arm laparoscopic surgery by controlling two additional robotic arms via haptic foot interfaces. Roboticists at EPFL have combined multi-limb manipulation with advanced shared control augmentation for an unprecedented advance in the field of laparoscopic surgery. The results, published in The International Journal of Robotics Research , confirm the feasibility of the setup for reducing surgeon workload and improving precision and safety. Specialists have already been successfully trained on the system and clinical trials are ongoing in Geneva. In a tight collaboration between the research group REHAssist and the Learning Algorithms and Systems Laboratory ( LASA ), PhD students Jacob Hernandez and Walid Amanhoud and a team of researchers developed a system that allows surgeons, in addition to their two natural arms, to control two additional robotic arms using haptic foot interfaces with five degrees of freedom. Each hand controls a manipulative instrument, while one foot controls an endoscope/camera, and another foot controls an actuated gripper. One key innovation of this system lies in the shared control between the surgeon and the robotic assistants.
TO READ THIS ARTICLE, CREATE YOUR ACCOUNT
And extend your reading, free of charge and with no commitment.
Your Benefits
- Access to all content
- Receive newsmails for news and jobs
- Post ads