Ausgestattet mit 16 möglichen Konfigurationen, die vielseitig und ziemlich komplex sind, bleibt das Digits-System, das am Labor für rekonfigurierbare Robotik der Fakultät für Ingenieurwissenschaften und -techniken der EPFL entwickelt wurde, relativ einfach. Jede Konfiguration besteht aus mehreren Modulen - oder Digits -, die aus starren Verbindungen bestehen, die durch flexible Gelenke miteinander verbunden sind. Diese Gelenke werden durch unter Druck stehende Lufttaschen gesteuert, um die Form und Steifigkeit der Module zu verändern.
In einer Studie, die in Advanced Intelligent Systems, Jamie Paik, Leiter des Laboratoriums für rekonfigurierbare Robotik, und sein Team beschreiben detailliert zwei Digits-Konfigurationen - den tragbaren TangiGlove und den tragbaren TangiBall -, die die Vielseitigkeit ihres Systems demonstrieren.
"Haptische oder taktile Schnittstellen können Virtual-Reality-Erlebnisse verbessern, indem sie reale Berührungen nachahmen, und die Rehabilitation durch interaktive Systeme fördern. Es besteht jedoch ein echter Bedarf an rekonfigurierbaren Designs und allgemeineren Steuerungsmethoden", erklärt Serhat Demirtas, Doktorand und Hauptautor.

So reichhaltig wie der menschliche Tastsinn
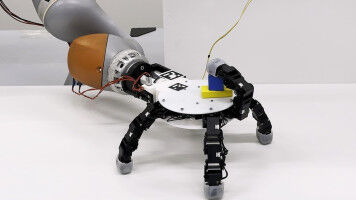
Im Gegensatz zu anderen Sinnen wie Sehen und Hören, die weitgehend passiv sind, erfordert der Tastsinn komplexe Aktionen wie Reiben oder Greifen, um Textur, Temperatur, Gewicht, Form oder Steifigkeit wahrzunehmen. Haptische Technologien werden daher oft nur für eine einzige Verwendung oder einen einzigen Aspekt des Tastsinns entwickelt, da es äusserst schwierig ist, Systeme zu schaffen, die Anpassungsfähigkeit und Skalierbarkeit mit einem realistischen haptischen Erlebnis kombinieren können.Das Digits-System meistert diese Herausforderung mithilfe der rekonfigurierbaren Robotik, der Expertise aus Jamie Paiks Labor. Bemerkenswerterweise deckt das System zwei Hauptkategorien von Roboterkonfigurationen ab: geschlossene und offene Ketten. Während Strukturen mit offener Kette aus einer Reihe von Verbindungen bestehen, die an einem Ende miteinander verbunden sind, wie z. B. ein Roboterarm, haben Konfigurationen mit geschlossener Kette in der Regel ein Schleifendesign mit zwei festen Enden. Der TangiGlove mit offener Kette ähnelt daher einem Exoskelett, das zur Bereitstellung eines Steifigkeitsfeedbacks verwendet werden kann. Der TangiBall mit geschlossener Kette wiederum verfügt über vier verbundene Digits, die bis zu acht verschiedene Formen annehmen können - von einem Würfel bis zu einer Kugel - und darüber hinaus ein Steifigkeitsfeedback liefern. Beide Geräte können auch Vibrationen erzeugen.
Neben seinem modularen Aufbau zeichnet sich das Digits-System durch die Betonung der pneumatischen Betätigung (Druckluft) aus, einem unterforschten Bereich der Robotik für personalisierte haptische Erlebnisse. Um diese Lücke zu schliessen, erweiterten die Wissenschaftler die Open-Source-Robotiksoftware Feelix, damit die Benutzerinnen und Benutzer personalisierte pneumatische haptische Interaktionsprofile erstellen können. Das auf maschinellem Lernen basierende System kann berührungsinduzierte Veränderungen in den Digits-Modulen erkennen und intelligente und intuitive Interaktionen erstellen, ohne dass eine Codierung erforderlich ist.
Das Team plant, das rehabilitative Potenzial seiner Technologie zu entwickeln, indem es therapeutische Szenarien und die langfristige Nutzbarkeit bewertet. Die Wissenschaftler untersuchen ausserdem eine breitere Palette von Anwendungen durch neue Konfigurationen, insbesondere solche, die den schnellen Wechsel des Geräts zwischen verschiedenen Grössen, Formen und Steifigkeiten nutzen - eine wesentliche Voraussetzung für die Echtzeitinteraktion in virtuellen und augmentierten Umgebungen.

Referenzen
Demirtas, S., van Oosterhout, A., Kadungamparambil John, R. and Paik, J. (2025), Reconfigurable Haptic Feedback: Comprehensive Design and Control Framework. Adv. Intell. Syst. 2500142. https://doi.org/10.1002/aisy.202500142Die 16 möglichen Konfigurationen der Digits-Module. 2025 RRL EPFL CC BY SA 4.0
Digits zeigt Potenzial für Virtual-Reality-Umgebungen 2025 RRL EPFL CC BY SA 4.0