Aude Billard, et directrice du laboratoire d’algorithmes et systèmes d’apprentissage de l’
Aude Billard, et directrice du laboratoire d’algorithmes et systèmes d’apprentissage de l’
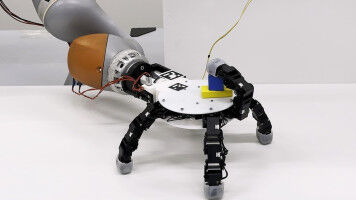
Aude Billard, et directrice du laboratoire d'algorithmes et systèmes d'apprentissage de l' EPFL © Alain Herzog 2021 EPFL Deux groupes de recherche de l'EPFL ont développé un programme informatique d'apprentissage machine connecté au cerveau. Il permet au robot d'ajuster son comportement en fonction des impulsions cérébrales qu'il reçoit. Cette découverte se destine à fournir plus d'autonomie aux personnes souffrant de tétraplégie. Impossible de parler et encore moins d'effectuer le moindre mouvement. La tétraplégie rend les personnes qui en souffrent prisonnières de leur propre corps. Aude Billard, professeure et directrice du laboratoire d'algorithmes et systèmes d'apprentissage de l'EPFL, ainsi que José del R. Millán, directeur du laboratoire d'interface cerveau-machine de l'EPFL, cherchent depuis de nombreuses années des solutions concrètes pour restituer un peu d'autonomie à ces individus entièrement paralysés. Les personnes atteintes d'une lésion de la moelle épinière présentent souvent des déficits neurologiques permanents et des handicaps moteurs graves, qui les empêchent d'effectuer les tâches quotidiennes les plus simples, comme saisir des objets.
UM DIESEN ARTIKEL ZU LESEN, ERSTELLEN SIE IHR KONTO
Und verlängern Sie Ihre Lektüre, kostenlos und unverbindlich.
Ihre Vorteile
- Zugang zu allen Inhalten
- Erhalten Sie Newsmails für Neuigkeiten und Jobs
- Anzeigen veröffentlichen