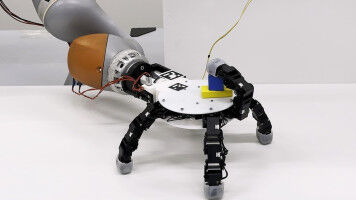
Kollaborative Medizinroboter sollen kollisionsfreie, intuitive und leichte Bedienung auch von schwerem Equipment über längere Zeit hinweg ermöglichen. Georg Rauter zeigt ein Projekt seiner Teammitglieder Murali Karnam und Nicolas Gerig.
Kollaborative Medizinroboter sollen kollisionsfreie, intuitive und leichte Bedienung auch von schwerem Equipment über längere Zeit hinweg ermöglichen. Georg Rauter zeigt ein Projekt seiner Teammitglieder Murali Karnam und Nicolas Gerig. Georg Rauter entwickelt Mikroroboter als Werkzeuge für Hirnchirurginnen, Zahnärzte und für Operationen an Knochen. Gut vernetzt mit Forschenden in der Schweiz und weltweit möchte er Basel als Hub für Medizinrobotik etablieren. Herr Rauter, was wäre der perfekte Roboter, den Sie in Ihrer Forschungskarriere entwickeln möchten? Das möchte ich mit einer Anekdote beantworten: Ich hatte ein Schlüsselerlebnis im Rahmen meiner Doktorarbeit an der ETH Zürich. Dort habe ich einen robotischen Rudersimulator entwickelt, mit dem man rudern lernen kann. Das System spürt die Bewegungen, merkt, wo Fehler passieren, und gibt personalisiert Feedback, zum einen grafisch, zum anderen indem es mit Zug und Widerstand den optimalen Ablauf anleitet.
UM DIESEN ARTIKEL ZU LESEN, ERSTELLEN SIE IHR KONTO
Und verlängern Sie Ihre Lektüre, kostenlos und unverbindlich.